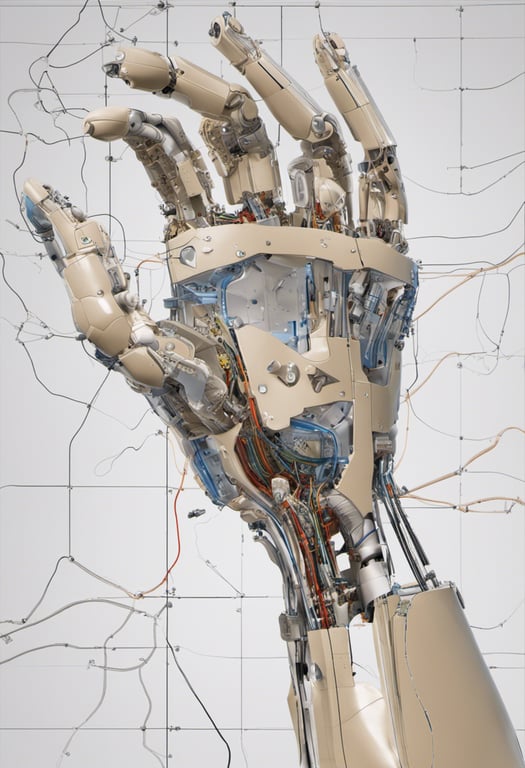
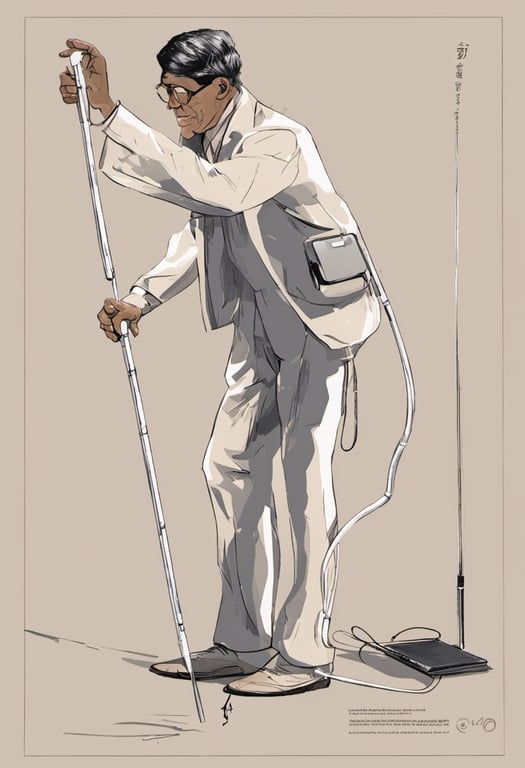
Assistive prosthesis system for blind amputees to grasp objects
Published on:
14 August 2023
Primary Category:
Robotics
Paper Authors:
Chunhao Peng,
Dapeng Yang,
Ming Cheng,
Jinghui Dai,
Deyu Zhao,
Li Jiang
Bullets
Key Details
Prosthesis system combines voice control, computer vision, auditory and tactile feedback
Helps blind amputees sense environment, navigate, and grasp objects
Users quickly learned to use system and reliably grasped objects
Auditory and tactile feedback guides users to objects
Explore the topics in this paper





AI generated summary
Assistive prosthesis system for blind amputees to grasp objects
Researchers developed a multi-sensory prosthesis system to help blind and visually impaired amputees with sensing, navigation and grasping objects. It uses voice interaction, computer vision, auditory and tactile feedback, and collaborative robot control. In experiments, subjects used the system to reliably grasp objects in cluttered environments with minimal training.
Answers from this paper
You might also like
Teleoperation with haptic feedback using low-cost tactile sensors
Learning dexterity from human demonstrations
Blind Surface Shape Sensing
Vision-based tactile sensing for multimodal contact information
Simplified model for assisting the visually impaired
Computer Vision: A New Set of Eyes for the Visually Impaired
Comments
No comments yet, be the first to start the conversation...
Sign up to comment on this paper